
Ver hitórico de Fotos
Ver hitórico de Órdenes
NOTAS: El proyecto consiste en controlar un robot autónomo por medio de una web.
Explicación en el lado del usuario
- Entro en raybot.es y veo las últimas fotos realizadas por las webcams o el video en directo.
- Tambien veo la fecha, hora, temperatura y humedad en la que se ha realizado la foto.
- Se tiene la opción de hacer nueva foto con temperatura y humedad.
- Opciones de mover 2 brazos horizontalmente y verticalmente.
Opciones de mover 2 motores, adelante y atrás.- Opciones de mover 1 motor, adelante y atrás.
- Mover derecha, izquierda o centro
- Ver histórico de fotos
- Ver histórico de ordenes
- Ver video
- Mido distancia al suelo para futuras mejoras.
- Es decir, desde la web se puede ver y mover el robot dándole ordenes.
Se emite en directo por medio de twitch.tv vídeo en vivo y directo.- Se emite en web con Node.js
Apuntes y explicación del desarrollo
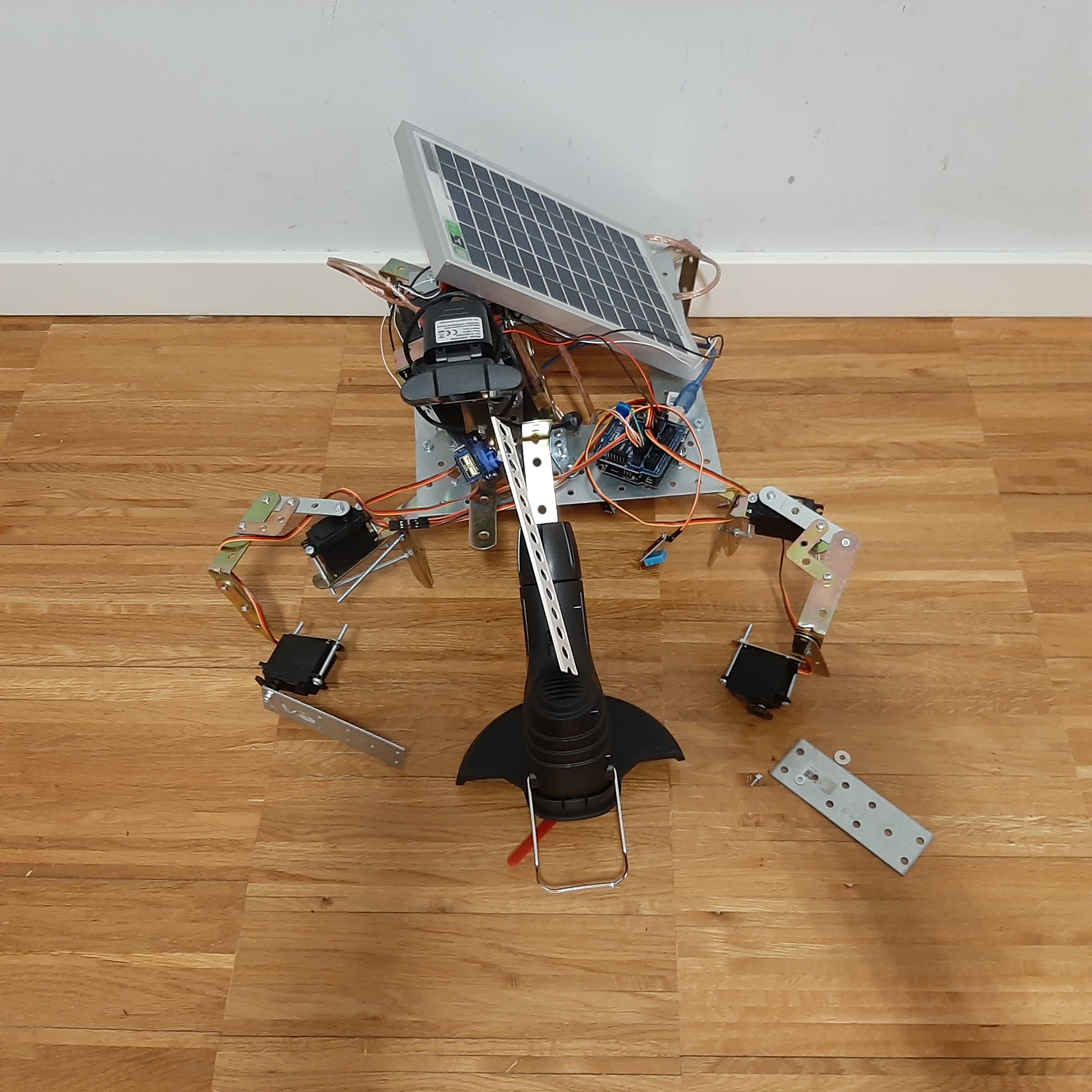
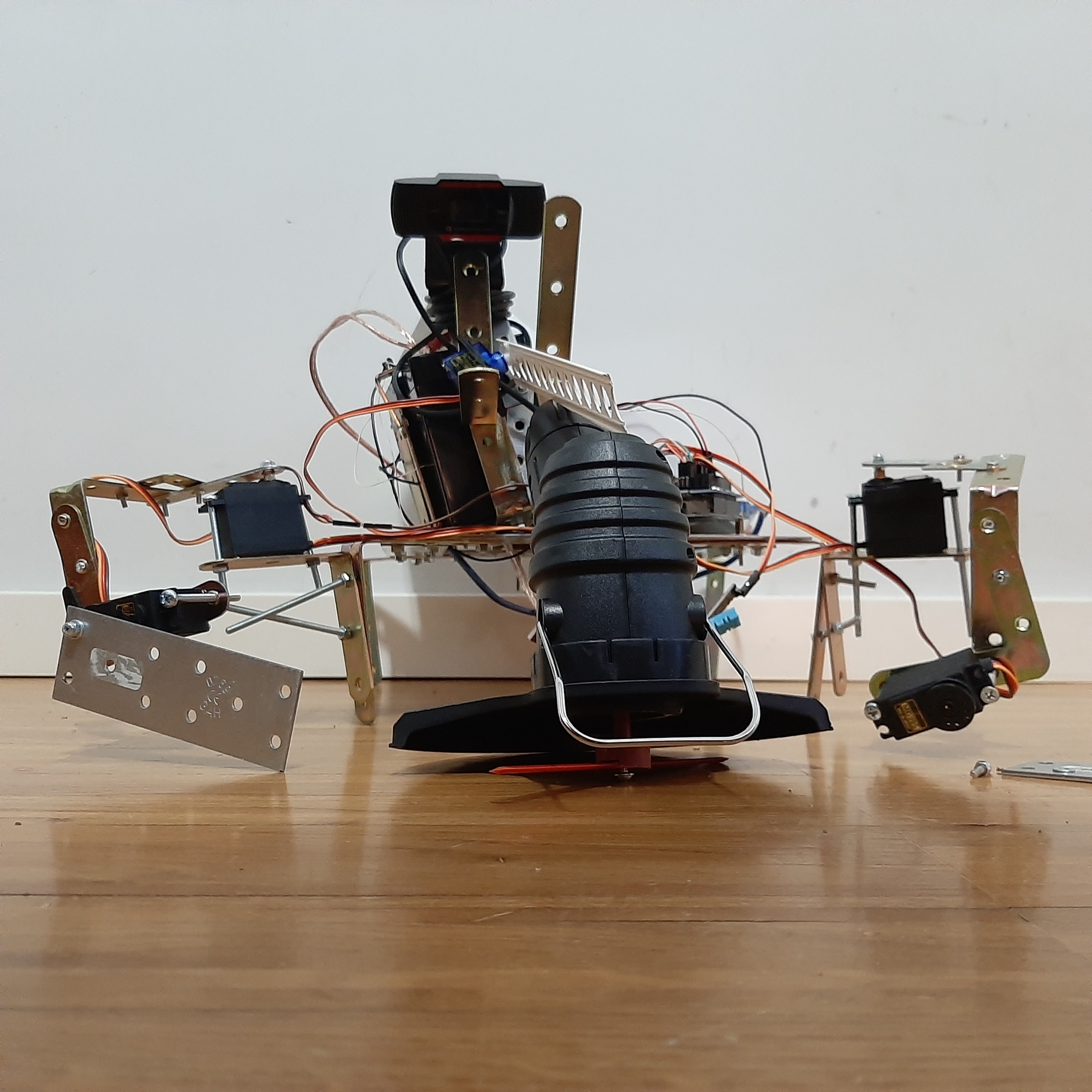
En arduino tengo conectado 2 sensores de temperatura y humedad, 4 servos, 2 para cada brazo, y 1 motor para moverlo adelante, atrás, y un servo para derecha o izquierda.Utilizo una rasberry alimentada por dos baterias,
que la conecto a internet con una tarjeta de internet movil tipo SIM
y dos webcam por usb.
En el PC dispone de un código python para comunicarse con arduino, envia y recibe datos a base de datos remota por medio de GET y POST, a un archivo php.
Edito el arranque de pc para ejecutar un cron.sh:
- fswebcam para que haga fotos cada hora
- ejecuta python para recoger los datos de temperatura y humedad que recibe con python desde serial que devuelve arduino.
- ejecuta python para guardar esos datos con POST, tipo webservice con usuario/contraseña y certificado de seguridad.
- ejecuta python para recoger ordenes con GET, tipo webservice con usuario/contraseña y certificado de seguridad.
Conectamos tw emisión en directo y aparece en la web con iframe.
Hardware:
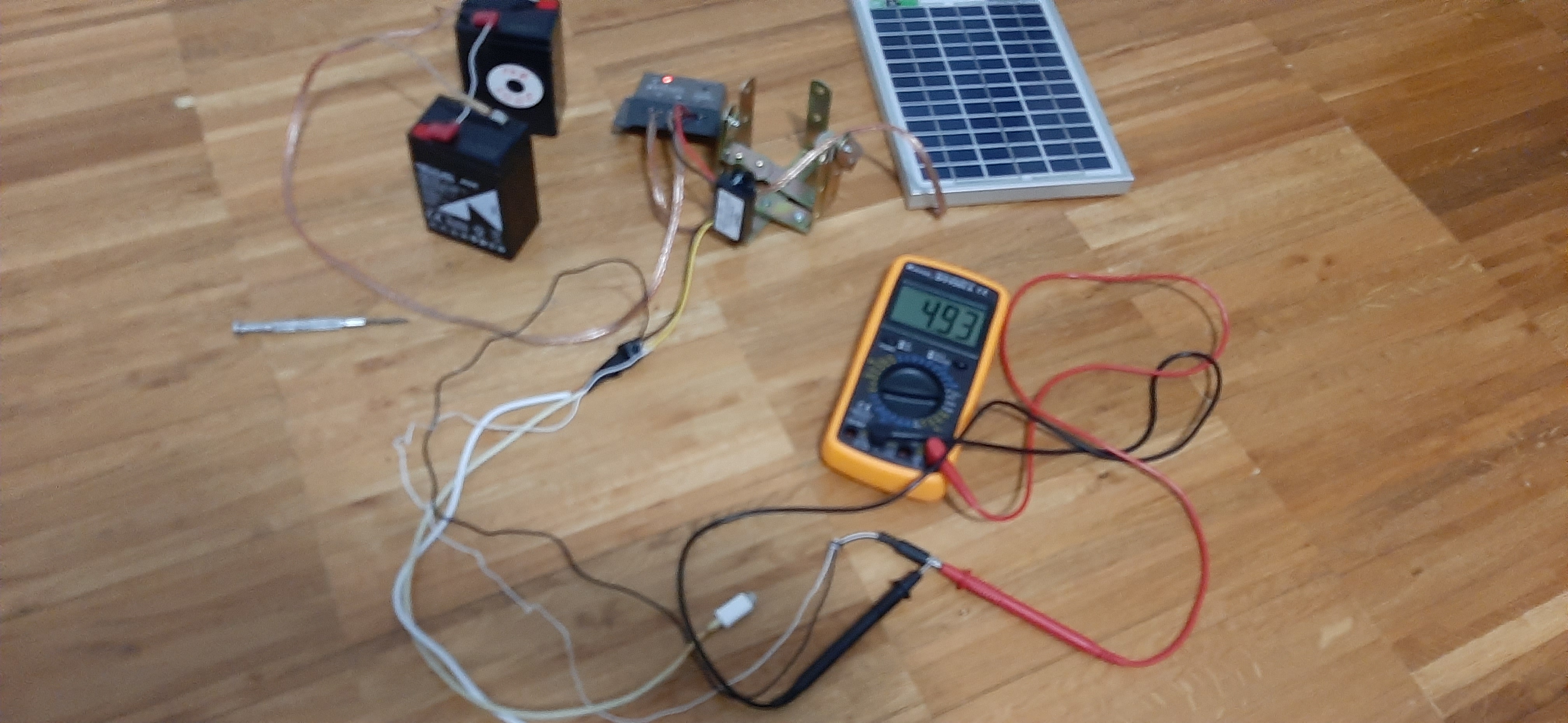
- Placa solar 12V
- 2 baterias de plomo de 6V, 7 Amperios
- Regulador de carga
- Controlador CC de 12 a 5 V.
- Controlador CC de 12 a 6 V.
Inversor 12V DC a 200V- Rasberry pi 3
Portatil Ultrabook- Tarjeta de microSD 32GB
SIM808, GSM,GPRS,IPX,... simcard*- USB tipo Router con SIM
- Arduino uno
- Arduino Sensor Shield V 5.0
- 2 Sensores de temperatura y humedad DHT11
- 4 Micro servo motor MG995
- 2 Relés para avanzar y girar
- Sensor de distancia HC-SR04 HCSR04
Módulos desarrollados:
- Un modulo para los sentidos que recibimos del robot, es decir sensores de temperatura y humedad, y dos webcam que por defecto veremos imagen de la última foto realizada.
- Un módulo para las órdenes que enviamos al robot. Inicialmete, por medio de dos servos, podemos mover la webcam horizontalmente y verticalmente a posiciones concretas o paso a paso.
- Módulo para guardar datos como imagen, fecha/hora, temperatura, humedad, orden, distancia
Otros
Rasbian como sistema operativo para rasberry pi 3, utilidades como python, ide arduino...Ubuntu 22.04, arm64, como sistema operativo para rasberry pi 4, utilidades como python, ide arduino...- Ubuntu 22.04, como sistema operativo para portatil, utilidades como python, ide arduino...
OBS para emitir en directo en Twitch las camaras web conectadas al portatil- Servidor WebSocket (Node.js/Python)
- El actual servidor web con apache, php y mysql raybot.es
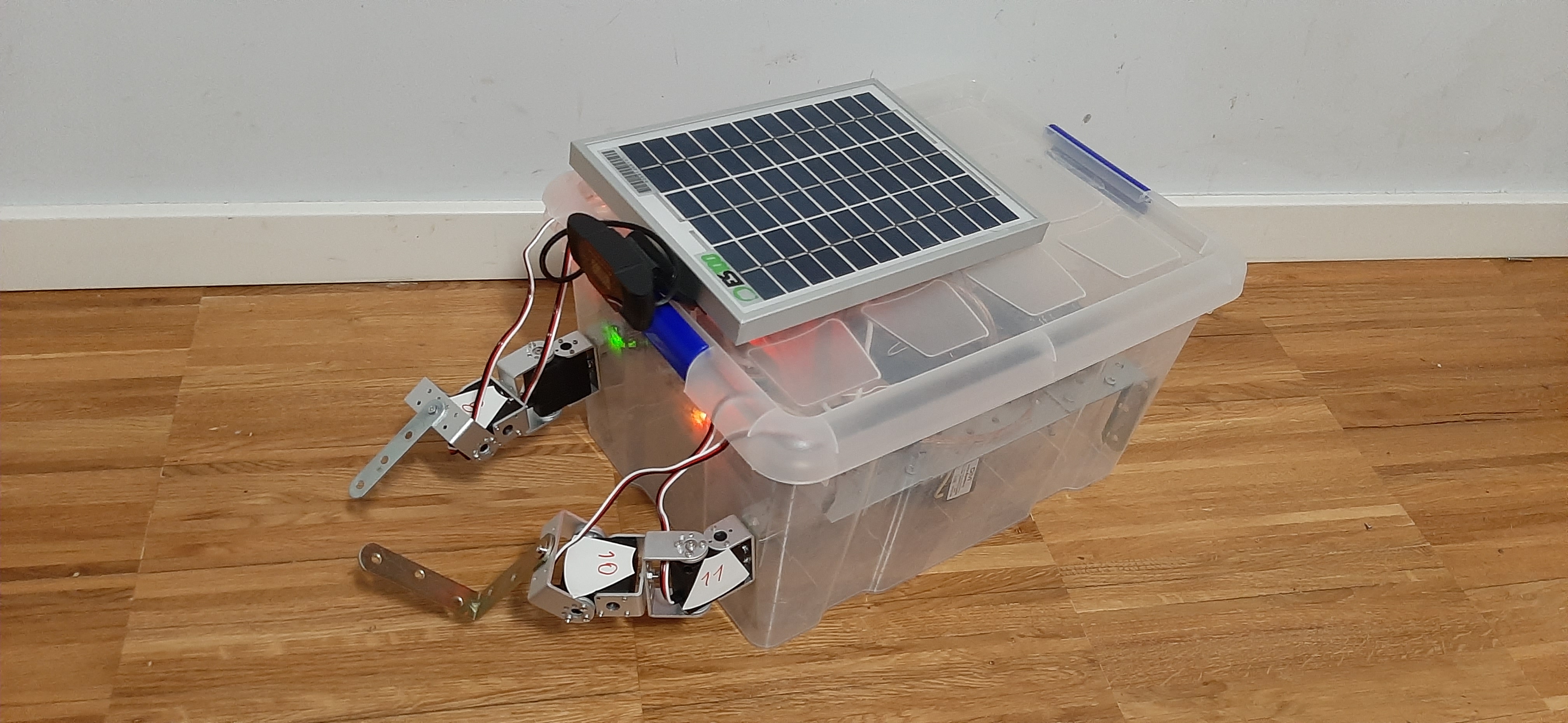
- Estructura formada con escuadras de acero inox.
Se recubre con una tapadera de laminas de metracritato transparente en forma de cubo, unidas por silicona. Y se pinta con spray.Se recubre con una caja de plástico transparente en forma de cubo y tapadera.- Coche juguete de plástico con motor y volante
Ideas futuras: IA, Automatización de procesos, loT y BigData
¡